Colaboró con la información:
Mauricio Rodríguez Calvo
Docente de la UTN
El profesor Dr. Ing. Mauricio Rodríguez Calvo, junto con los estudiantes Kenneth Quirós Chaves y Jocelyn Wray Quirós, logró la aceptación del trabajo titulado “A variable-reach robotic gripper with extendable flexible fingers in a fixed-base experimental setup” en la conferencia RoboSoft 2026, que se celebrará en Kanazawa, Japón.
Este logro representa un importante avance para la investigación aplicada desarrollada desde la Universidad Técnica Nacional, ya que RoboSoft es una de las conferencias internacionales más relevantes en el campo de la robótica suave. La aceptación del trabajo permite visibilizar el talento estudiantil y docente de la UTN en un escenario académico de alto nivel, junto a investigadores de universidades y centros especializados de distintas partes del mundo.
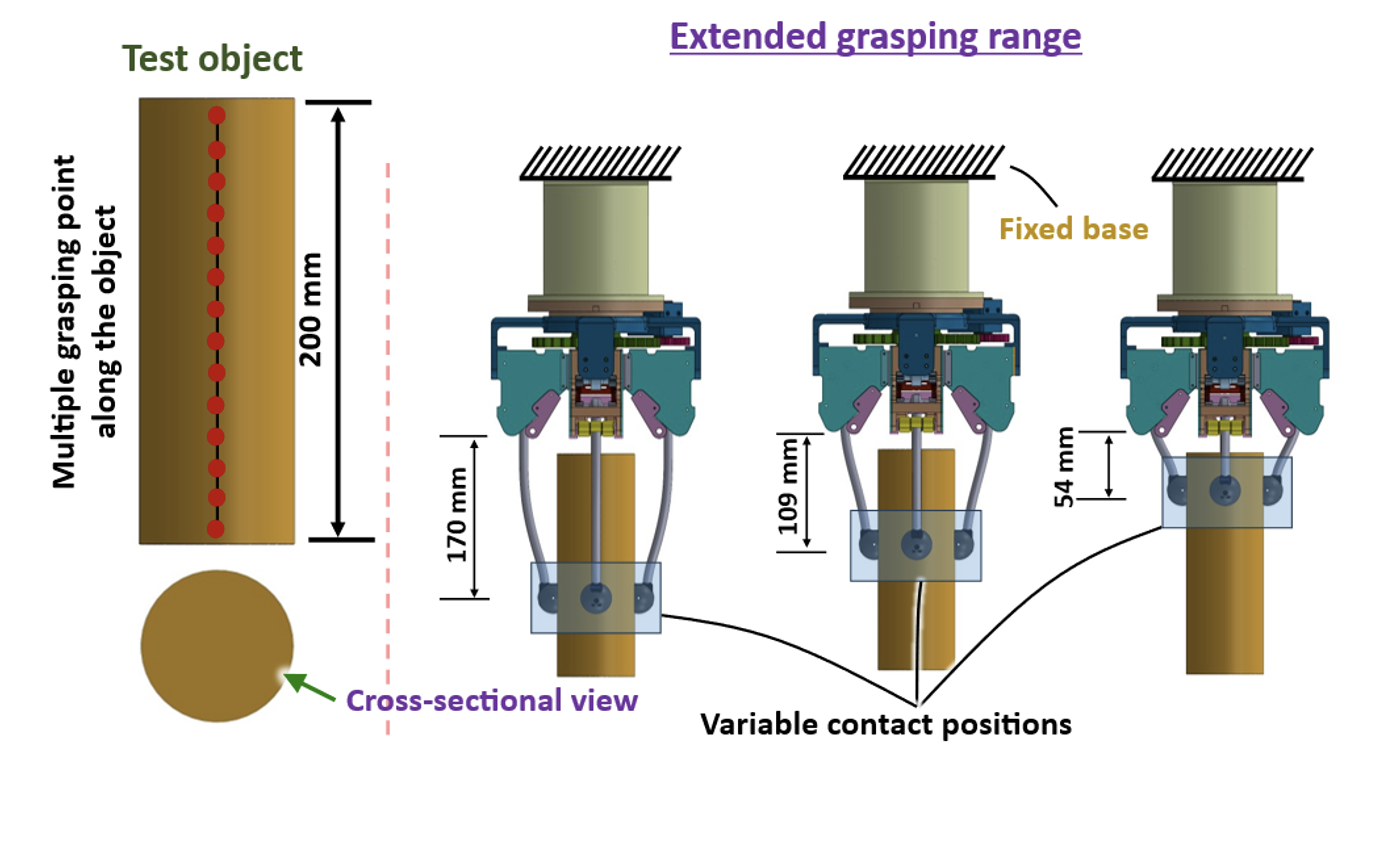
La investigación presenta una garra robótica de alcance variable, compuesta por cuatro dedos flexibles fabricados a partir de pajillas plásticas modificadas. Estos dedos pueden extenderse o retraerse mediante un mecanismo de enrollado y desenrollado, lo que permite alcanzar objetos ubicados a diferentes distancias sin necesidad de mover la base del dispositivo. Además, el sistema utiliza un segundo mecanismo accionado por cintas de tensión para cerrar los dedos y generar el agarre del objeto.
El objetivo principal del diseño es facilitar la manipulación de objetos en entornos donde el acceso es limitado, como espacios estrechos, zonas con obstáculos o escenarios donde los objetos se encuentran parcialmente rodeados por otros elementos. De acuerdo con el documento técnico, la garra fue evaluada en una configuración experimental de base fija, demostrando que puede sujetar objetos ubicados tanto cerca como lejos de la palma, incluyendo pruebas de agarre a una distancia máxima aproximada de 30 cm.
Este trabajo fue desarrollado en el espacio que la Dirección de Investigación de la Sede Central ha designado para actividades de investigación, el cual se ha convertido en un punto de encuentro para el desarrollo de prototipos, validaciones experimentales y participación estudiantil en proyectos de ingeniería. La experiencia demuestra la importancia de contar con espacios institucionales que permitan a docentes y estudiantes transformar ideas en resultados concretos de investigación.
Además, esta iniciativa se vincula con los esfuerzos actuales para formular una propuesta de creación de un Laboratorio de Investigación en Ingeniería, que pueda integrarse posteriormente a un centro de investigación propio de la Universidad. Este tipo de proyectos evidencia el potencial de la UTN para desarrollar investigación aplicada con participación estudiantil, colaboración internacional y proyección hacia conferencias científicas de alto impacto.
La participación de Kenneth y Jocelyn en este proceso también resalta el valor de involucrar estudiantes en proyectos reales de investigación. Su aporte al desarrollo experimental de la garra robótica fortalece su formación profesional y demuestra que la investigación universitaria puede convertirse en una plataforma para que los estudiantes desarrollen habilidades en diseño, prototipado, análisis experimental, robótica y comunicación científica.
Con este logro, la Universidad Técnica Nacional reafirma su compromiso con la investigación aplicada, la innovación tecnológica y la formación de estudiantes capaces de participar en proyectos de alcance internacional. La aceptación de este trabajo en RoboSoft 2026 constituye un paso importante para seguir posicionando a la UTN como una institución con capacidad de generar soluciones de ingeniería desde sus propios espacios académicos y de investigación.