Colaboró con la información:
Mauricio Rodríguez Calvo
Docente de la UTN
El profesor Mauricio Rodríguez Calvo, docente e investigador de la Universidad Técnica Nacional, presentó tres propuestas de investigación ante la Vicerrectoría de Investigación y Transferencia, las cuales fueron aprobadas para su desarrollo en la Sede Central. Estos proyectos buscan fortalecer las capacidades institucionales en ingeniería aplicada, robótica, automatización, visión artificial e interacción humano–robot.
Las iniciativas serán desarrolladas bajo la dirección del profesor Mauricio y con la participación de estudiantes de las carreras de ingeniería de la UTN, así como la Profesora Machado, académica de la carrera de ingeniería en Producción Industrial, quienes podrán integrarse en actividades de diseño, programación, prototipado, experimentación, análisis de datos, validación de sistemas y divulgación científica. De esta manera, los proyectos no solo impulsan la generación de conocimiento, sino también la formación práctica de futuros profesionales en áreas tecnológicas de alta demanda.
La primera propuesta se orienta al desarrollo de una garra robótica electromagnética suave–rígida con control térmico distribuido, cuyo objetivo es generar interacciones hápticas más cómodas, cálidas y seguras durante el contacto físico con personas. Este proyecto busca integrar sensores, materiales flexibles y control de temperatura para mejorar la percepción de confort, seguridad y naturalidad en aplicaciones asistivas y colaborativas.
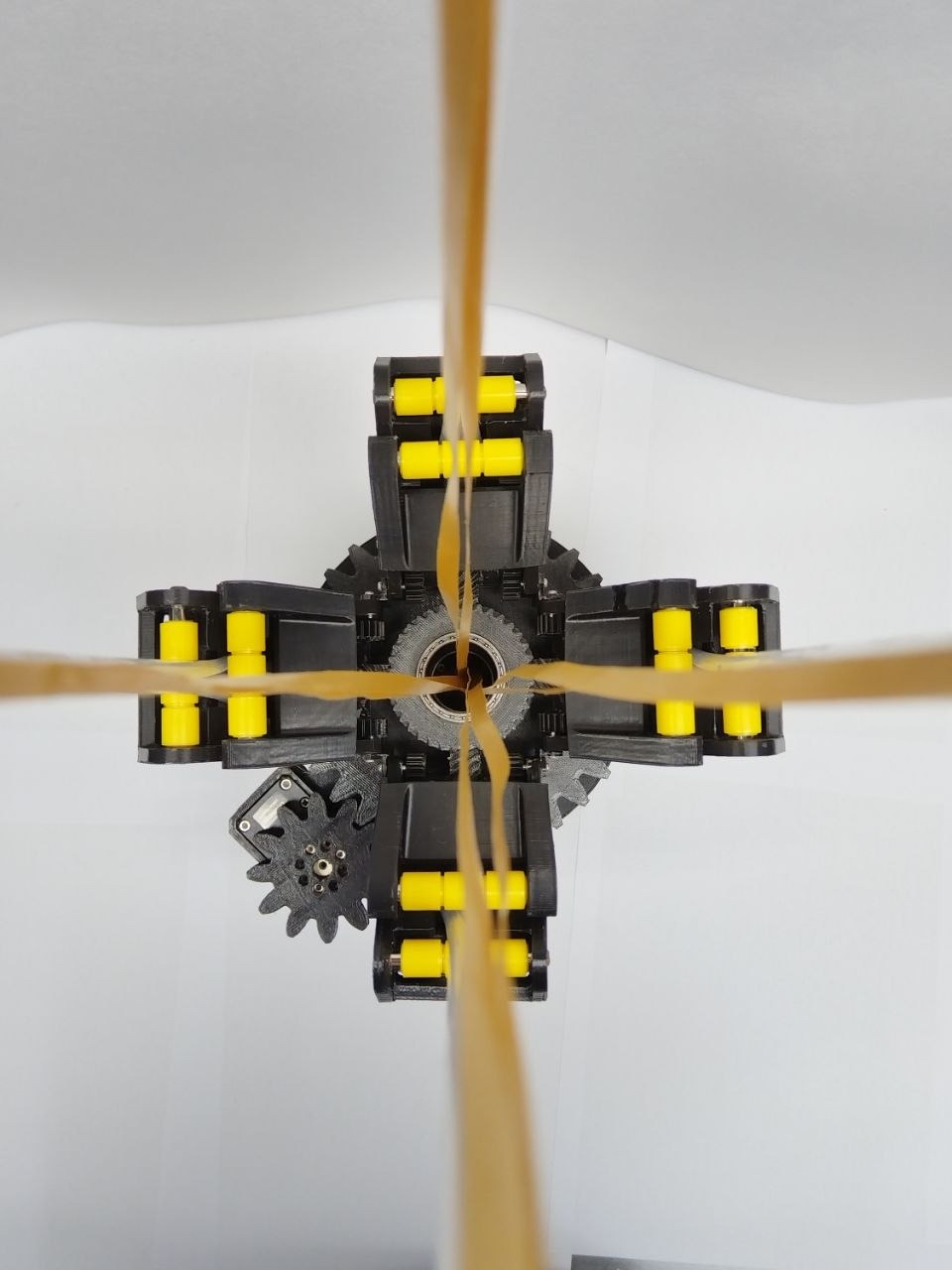
La segunda propuesta consiste en el diseño y desarrollo de una garra robótica flexible para la manipulación ágil de objetos agrupados en espacios reducidos. Esta investigación plantea una garra con dedos flexibles y extensibles, capaz de alcanzar objetos cercanos o lejanos sin depender exclusivamente del movimiento del brazo robótico. Además, busca permitir microajustes, micro-rotaciones y reposicionamiento del agarre sin soltar el objeto, lo que puede ser útil en entornos industriales, logísticos o de automatización donde los objetos se encuentran agrupados o confinados.
El tercer proyecto propone la integración de un sistema modular de visión artificial industrial basado en Machine Learning y manipulación robótica. Esta plataforma utilizará cámaras industriales, bandas transportadoras y brazos robóticos compactos para ejecutar procesos de inspección, manipulación y verificación de objetos. Además, servirá como banco de pruebas para validar científicamente diferentes manos y garras robóticas desarrolladas en el futuro Centro de Investigación en Ingeniería Aplicada de la UTN.
La participación estudiantil será un componente clave en el desarrollo de estas iniciativas. A través de estos proyectos, los estudiantes podrán involucrarse en procesos reales de investigación aplicada, fortalecer sus competencias en robótica, control, visión artificial, diseño mecánico, electrónica, manufactura digital y análisis experimental, y contribuir directamente al desarrollo de prototipos con potencial de transferencia tecnológica.
La aprobación de estas propuestas representa un paso importante para consolidar espacios de investigación aplicada en la Sede Central. Asimismo, contribuye a fortalecer la formación de talento humano, promover la innovación tecnológica y generar soluciones que puedan vincularse con necesidades del sector productivo, industrial, público y académico.
Con estos proyectos, la Universidad Técnica Nacional reafirma su compromiso con la investigación, la transferencia tecnológica y la formación práctica de estudiantes en áreas estratégicas para el desarrollo del país. La articulación entre robótica flexible, automatización inteligente, visión artificial y sistemas de interacción humano–robot abre nuevas oportunidades para posicionar a la UTN como una institución capaz de generar conocimiento aplicado y soluciones tecnológicas de alto impacto.